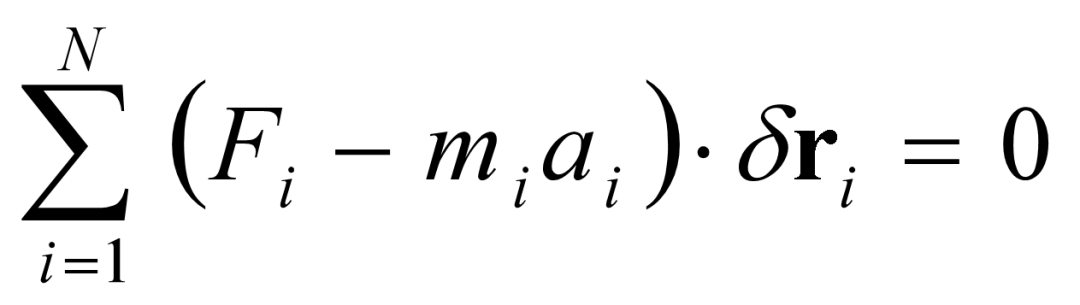
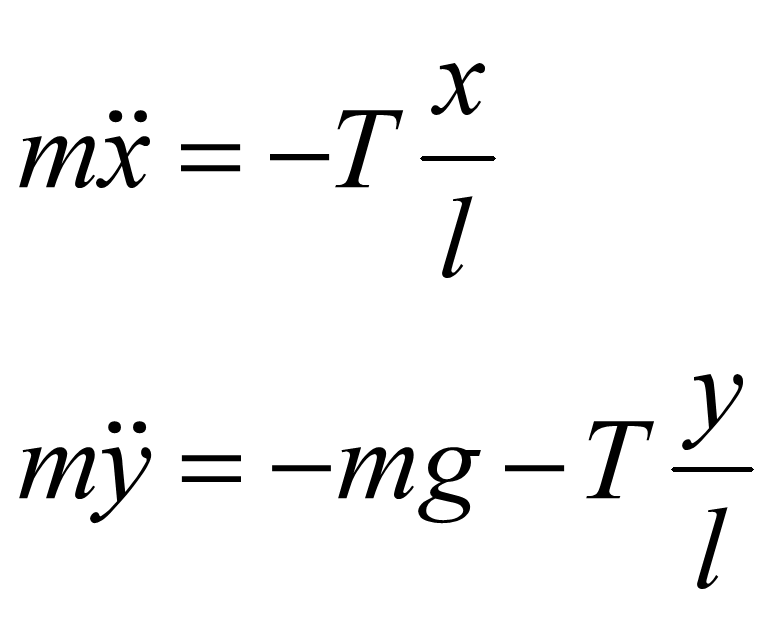
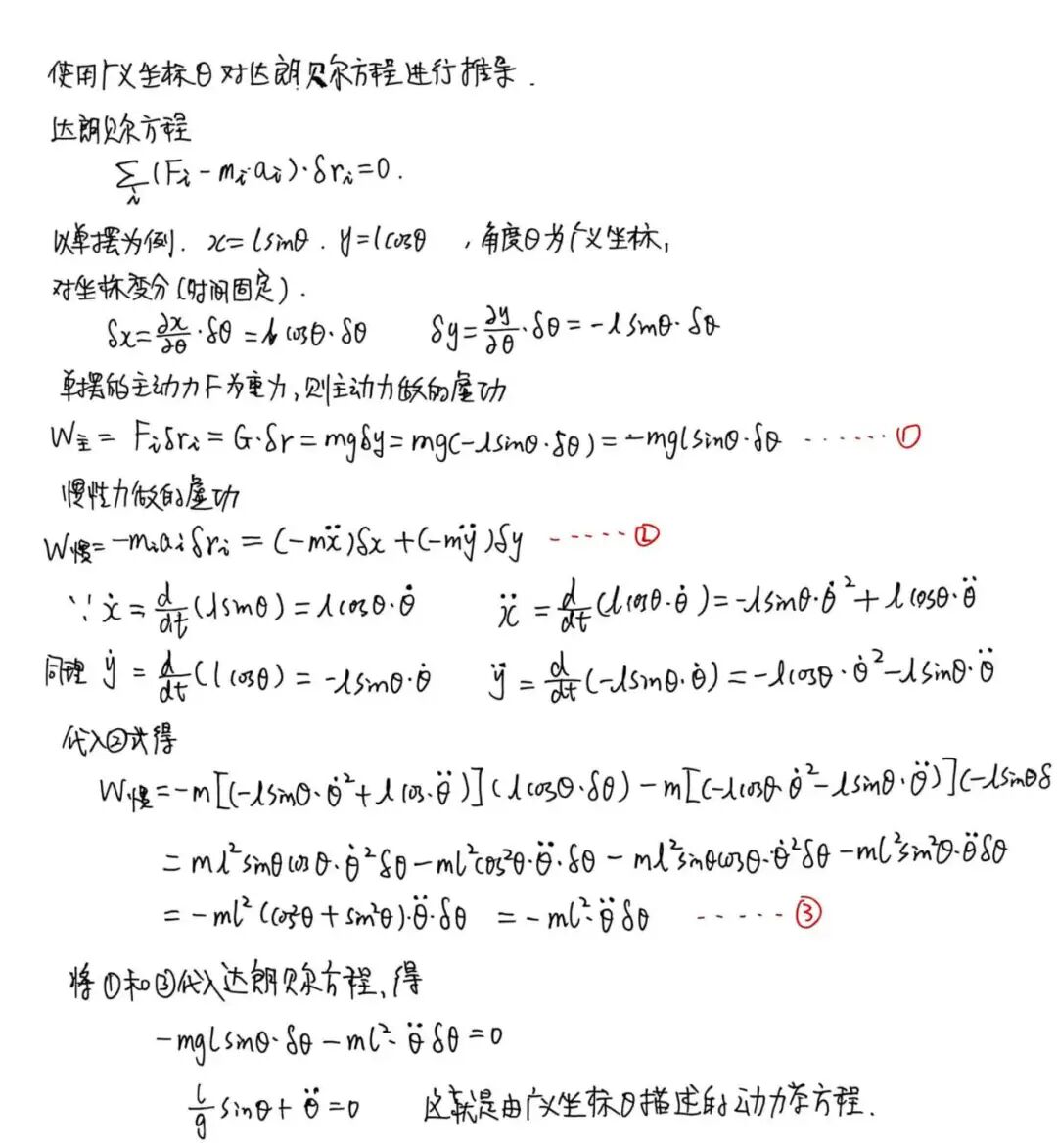
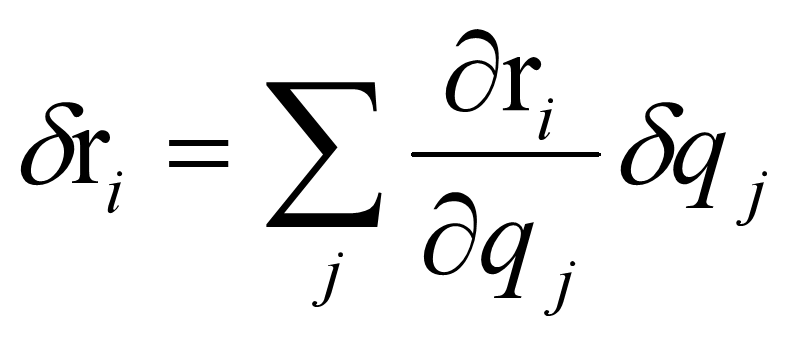
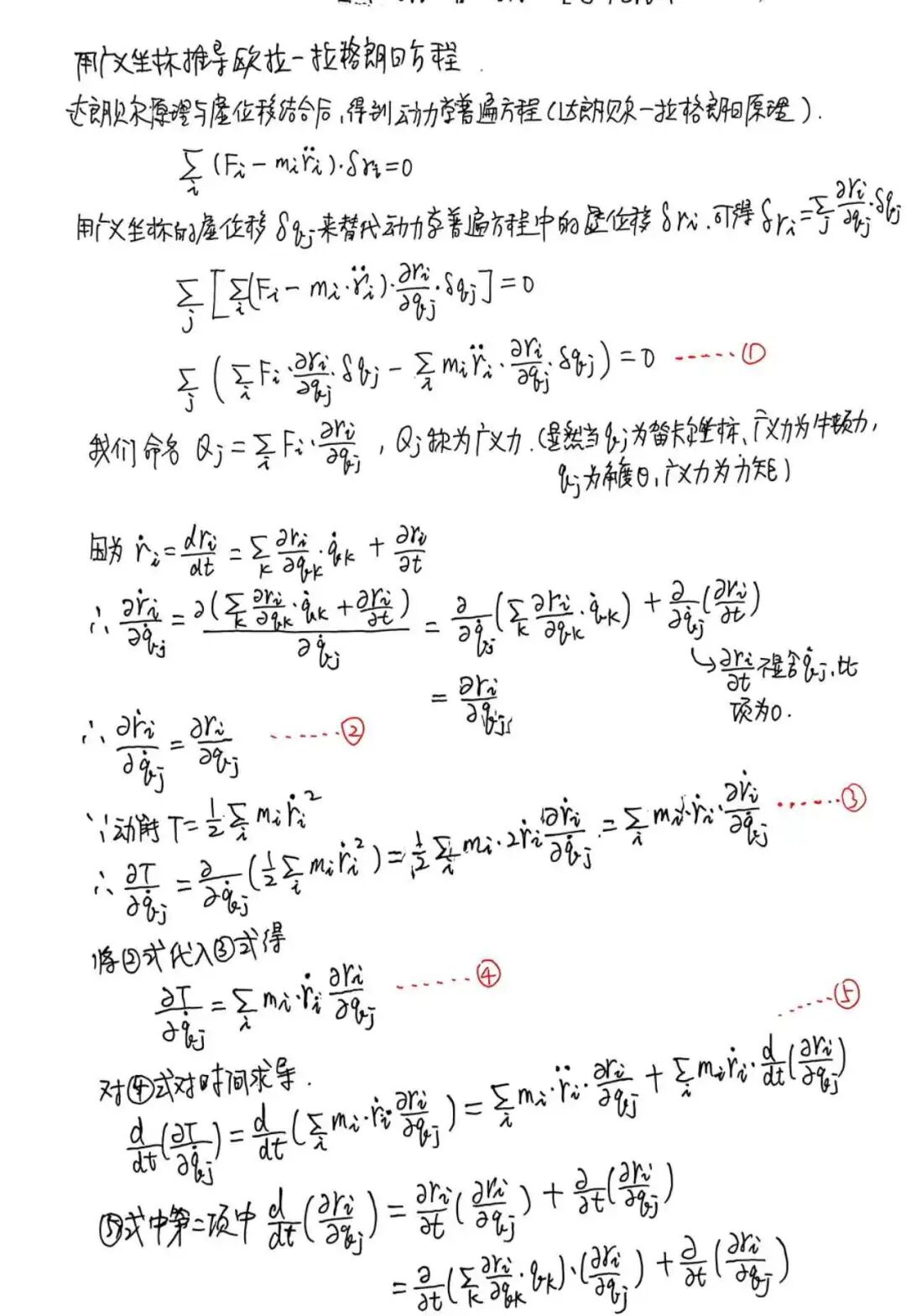
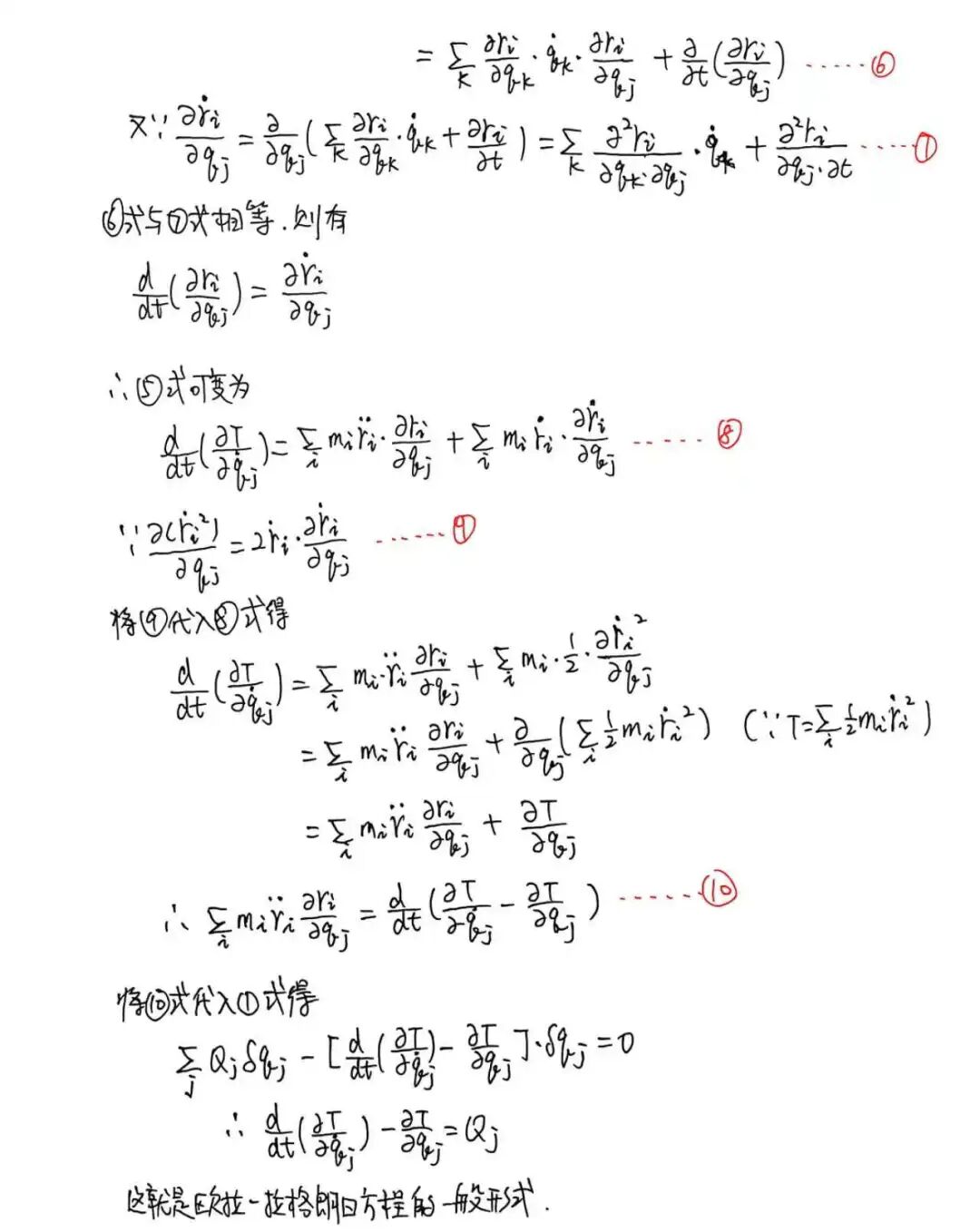
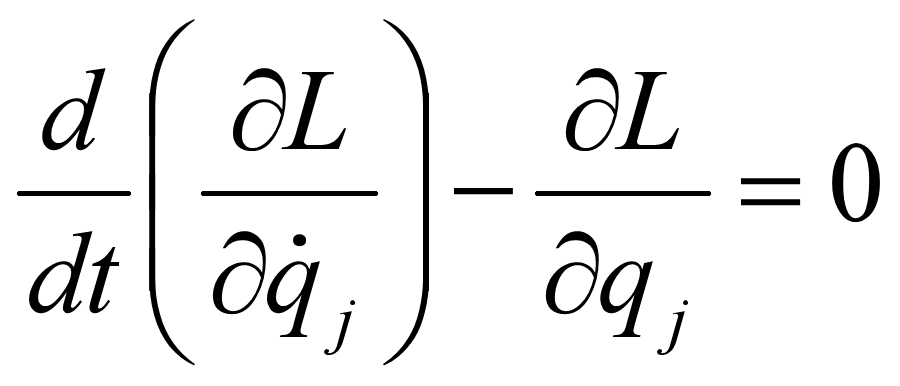
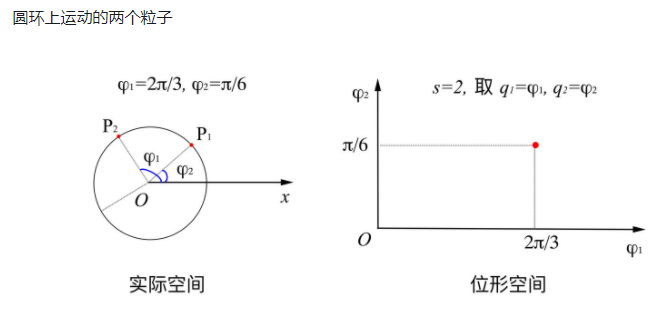
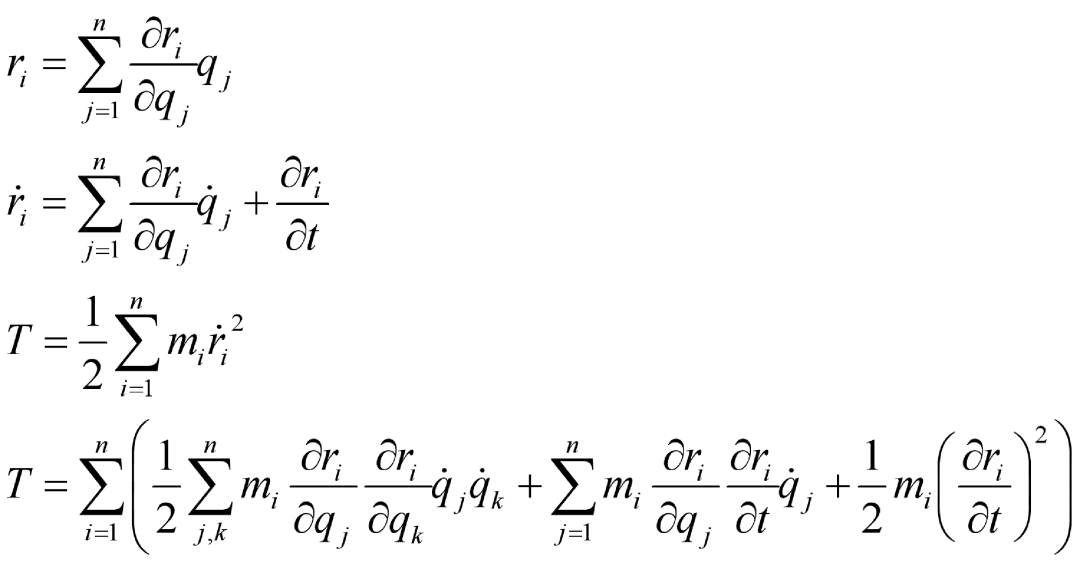
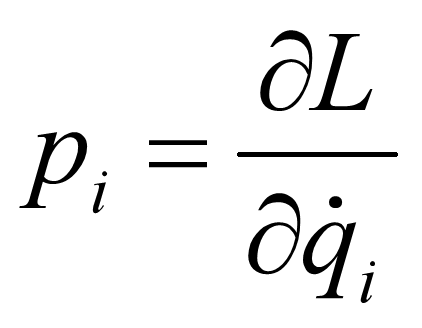
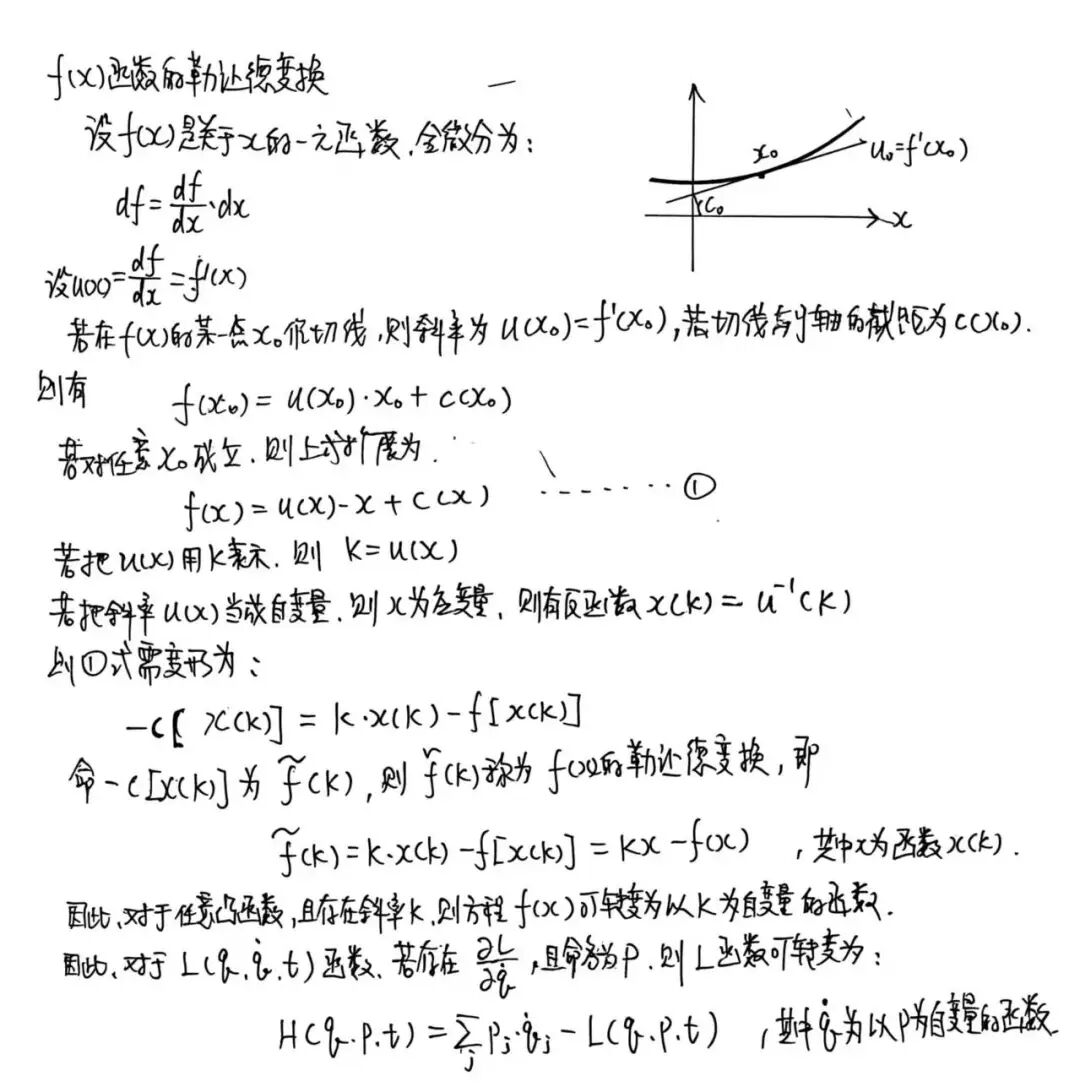
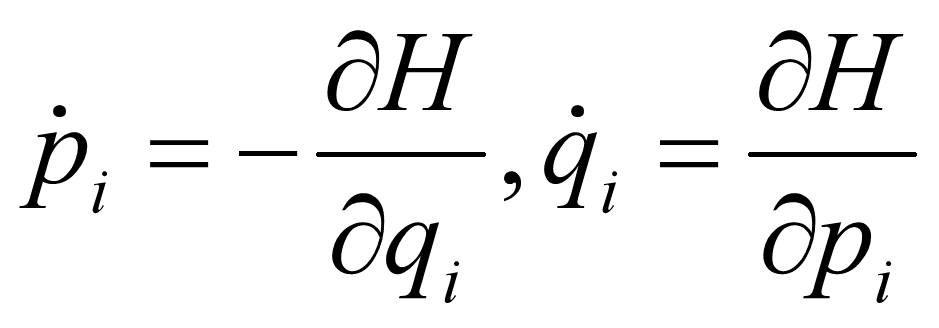
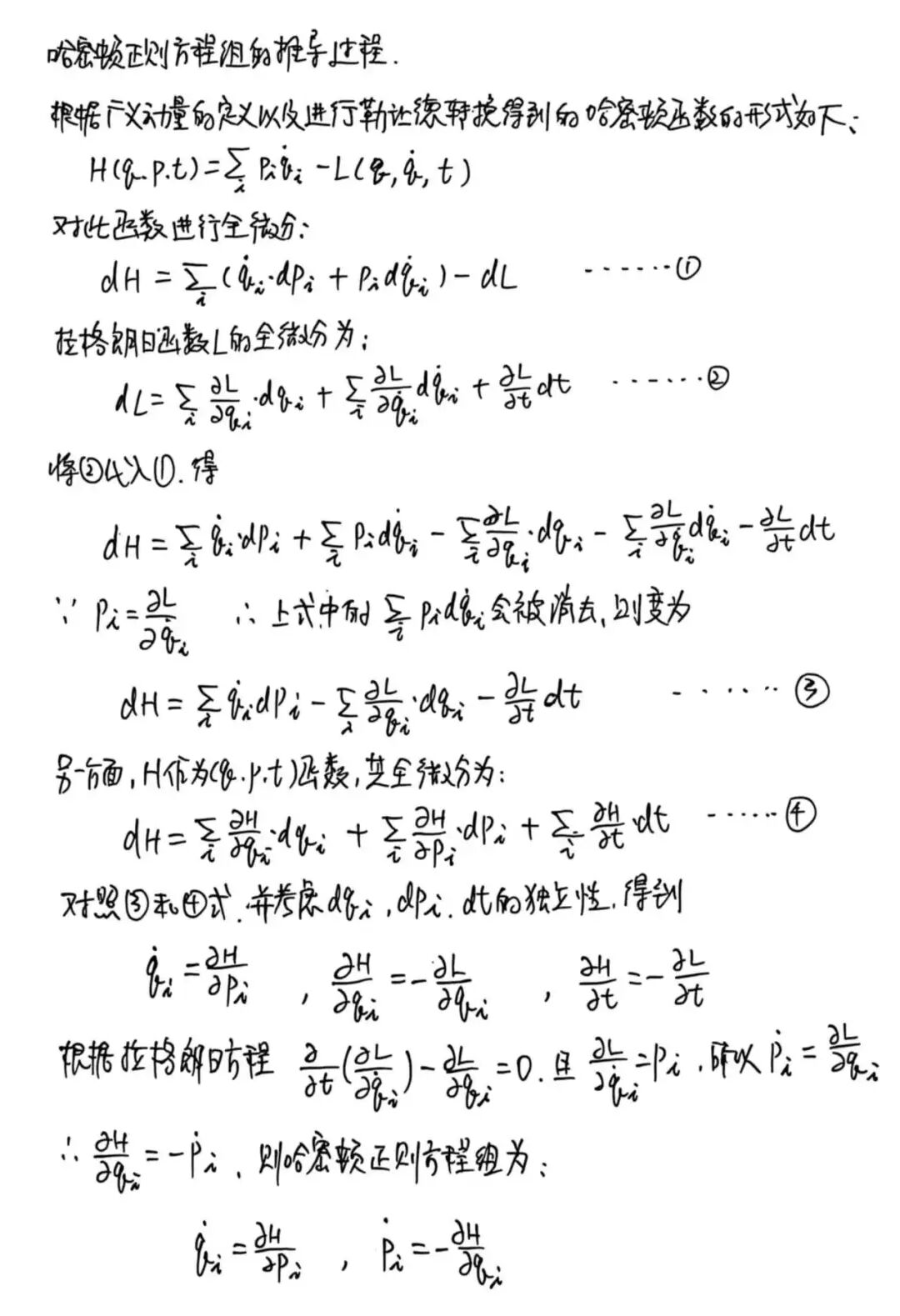
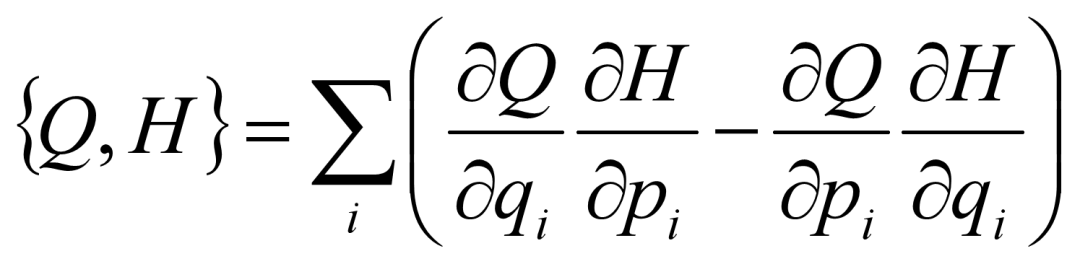
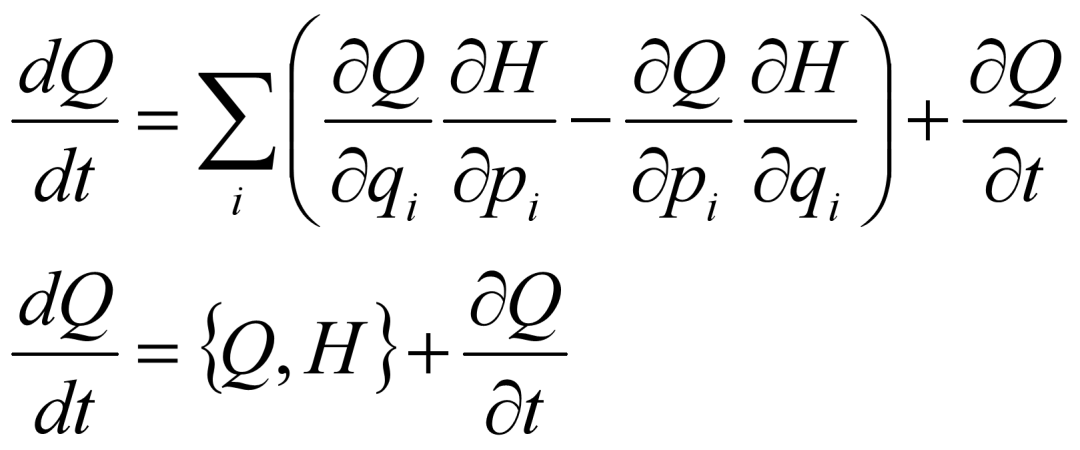
阅读数: 196 点击上方蓝字关注知新物理 “ 泊松括号是法国科学家泊松在求解哈密顿正则方程时所用的一种数学符号。 ” 一、牛顿力学的困境——难胜任复杂系统 不可否认,对于单个粒子的受力分析和运动判断,牛顿力学非常高效简便。 但传统的牛顿力学也遇到了困境,当遇到复杂的约束系统,约束力的数量会非常多,使用传统牛顿力学,会导致方程极其复杂甚至无法求解。 比如,一个五级齿轮传动系统,牛顿力学的做法是将系统分成五个部分,列出五个刚体运动方程,加上刚体间耦合约束,会出现数十个联立的微分方程组,这种处理方式极为复杂。 为了能高效地处理复杂的系统,人们开始不断探索有没有更简便的方法处理复杂系统。 二、达朗贝尔原理——动力学变为静力学 如何消去约束力,建立普适的动力学方程便是急需解决的问题。 法国人达朗贝尔在牛顿第二定律F=ma基础上通过移项,并加入虚位移,于是得到适应N个质点组成的系统的运动方程,这就是达朗贝尔方程,形式如下: 其中,F称为主动力,ma称为惯性力,δri称为虚位移。 达朗贝尔之所以进行移项,是为了将 “-ma” 这一项视为一个假想的力——惯性力。 这样一来,质点在每一瞬时都处于由“真实力”和“惯性力”共同作用下的“平衡”状态。 这个“移项”看似是数学把戏,但物理意义深远:它成功地将一个动力学问题,转化成了一个形式上的静力学问题。 既然变成了静力学问题,那么处理复杂约束的利器——虚功原理就可以派上用场了。 虚功原理是解决静力学约束问题的法宝,其核心是:对于理想约束(光滑、无摩擦),所有约束力在虚位移上所做的总功为零。 虚位移是假想的、无限小的、满足约束条件的位移,它不要求真实发生。 既然对于多质点系统内的约束力做的虚功为0,这样,对于多质点约束系统,就不需要考虑约束力了,运动方程变得更简单了。 三、达朗贝尔原理的短板——坐标仍受约束力影响 然而,达朗贝尔原理仍面临一些挑战。 比如,方程中的虚位移δri是笛卡尔坐标下的虚位移,它们并不是独立的——它们必须满足系统的几何约束。 这意味着,为了得到真正的运动方程,方程中的虚位移仍需要借助约束力来写出所有约束方程。 比如,一个单摆:质点在xy平面内运动,虽然约束力(张力)在虚功原理中自动消失,但位移方程x(t)和y(t)由约束力(张力)推导出来,牛顿第二定律的分量形式如下: 其中,T为张力。 显然,通过张力求解出运动方程仍是非常繁琐的。 四、广义坐标代替传统坐标 如果采用角度θ作为坐标(称为广义坐标,因为不同于笛卡尔坐标)来描述单摆运动,我们会发现,x,y的约束方程不再与张力T直接相关,形式变为: 将上述约束方程代入达朗贝尔原理的方程式中,我们将得到用广义坐标θ描述单摆的运动方程: 具体的推导过程如下: 在推导过程中,张力T从未出现,因为它作为约束力被广义坐标θ的选取被消去了。 也就是说,笛卡尔坐标x,y的位移方程不一定非要从约束力的角度来描述,也可以从广义坐标的角度来描述。 进一步,对于多刚体系统(如多连杆机械臂),每个质点如果选用广义坐标,则约束方程数量大大减少,而且避开了系统内约束力对运动方程推导过程的影响。 五、拉格朗日——利用广义坐标推导普适运动方程 法国人拉格朗日就是提出广义坐标的第一人。 他在达朗贝尔原理的基础上,利用广义坐标推导出了更普遍适用的运动方程。 他先用广义坐标的虚位移 δq将达朗贝尔方程中虚位移δr表示出来,它们之间的变换方式如下: 其中,广义坐标用q表示。 然后,将广义坐标q代入达朗贝尔方程中,我们最终将得到的方程如下: 其中,T为动能,Q为广义力。 这个方程就是著名的欧拉-拉格朗日方程的一般形式。 具体的推导过程如下: 当主动力Q为保守力时,可引入势能函数 V,则上述方程可变为: 进一步化简,用L代替T-V,并将L命名为拉格朗日函数,则得到的式子为: 于是,我们又得到了只有保守力作用的系统的欧拉-拉格朗日方程。 非常神奇,用少数几个标量函数(动能和势能)和广义坐标是完全可以取代复杂的力和矢量分析的。 现在,我们关注的是广义坐标q随时间变化,所有广义坐标张成的空间我们称为位形空间,如果有n个广义坐标,则构成一个n维空间。 六、欧拉-拉格朗日方程的局限 欧拉-拉格朗日方程在处理保守、完整、光滑的力学系统时简洁,但欧拉-拉格朗日方程仍存在局限之处。 1、方程直接适用于保守力(可由势函数导出)。对于耗散力(如摩擦力、空气阻力),必须引入瑞利耗散函数或改用其他方程,增加了建模复杂度。 2、方程通过选择广义坐标自动消去了理想约束力,但如果研究者需要知道某个约束力(如铰链受力),则无法直接从方程中获得,只能是需要额外使用拉格朗日乘子法或牛顿力学来求解约束力。 3、对于自由度较多的复杂系统(如多关节机械臂),写出动能的显式表达式并按欧拉-拉格朗日方程求导,过程极为冗长且容易出错。方程通常是二阶微分方程组,直接进行数值积分,,数值求解会面临巨大计算量。 比如,广义坐标下的动能T通常是二阶偏微分方程,它的普遍形式如下: 显然,广义坐标下的动能形式复杂,由于其形式是二阶偏微,求解时更为复杂。 尤其对于高维系统或非线性系统(例如双摆、机器人多连杆机构)。 4、欧拉-拉格朗日方程要求系统的运动是光滑的,难以直接描述碰撞、冲击等速度突变的瞬时事件。 七、哈密顿的破局——广义动量和勒让德变换 欧拉-拉格朗日方程是关于广义坐标q的二阶微分方程组。虽然物理意义上理解很直接,但在理论分析(如守恒量、可积性)和数值计算时,通常需要降阶为一阶系统。 为了将二阶微分方程变为一阶方程,爱尔兰人哈密顿做了两件事: (1)引入广义动量概念, 将拉格朗日函数与广义速度的偏分命名为广义动量。 在拉格朗日形式中,当拉格朗日量不显含某个广义坐标,则欧拉-拉格朗日方程会有: 所以,可以得到: 因为根据诺特定理,连续对称性对应守恒量。对于空间平移对称性,守恒量是普通动量,对于旋转对称性,守恒量是角动量。 拉格朗日函数对广义速度的偏微分是常数(与广义坐标无关)的性质与动量守恒(与坐标无关)的性质是完全一致的。于是,很自然,拉格朗日函数对广义速度的偏微分称为广义动量。 (2)利用勒让德变换,用广义动量替换掉广义速度,于是把关于广义坐标的二阶微分的拉格朗日函数L转变成了一阶形式的哈密顿函数H: 注意,在哈密顿函数中的q点不再是自变量,而是以广义动量p为自变量的函数。 勒让德变换的详细推导过程如下: 显然,勒让德转换中广义动量并不是建立在广义速度与质量乘积的基础上,而是建立在拉格朗日函数对广义速度偏微分的基础上,因此,广义动量是完全独立的一个物理量。 对哈密顿函数分别从定义式和勒让德式两个方向进行全微分,并通过比较,我们将得到一组方程组: 此式被称为哈密顿正则方程组。 具体的推导过程如下: 八、泊松括号——守恒量的判断工具 有了哈密顿正则方程组,则对于用广义坐标q和广义动量p来描述的任何系统, 我们会惊奇地发现,系统的任何一个物理量Q随时间的变化都可以通过哈密顿正则方程和泊松括号简洁地表达。 定义系统的任意物理量Q与哈密顿量H的泊松括号为: 对于任意物理量Q(q,p,t)其对时间的全导数为: 如果Q不显含时间,且{Q,H}=0,则意味着dQ/dt=0,即Q是一个常数,是一个守恒量。 于是,我们判断任何复杂系统中的某个物理量是否是守恒,只要判断这个量的泊松括号是否为0即可。 最后,需要说明一下,哈密顿函数H是否代表系统的总能量,则需要满足以下条件——动能T是广义速度q的二次齐次函数(无一次及零次项),且V仅依赖于q(可能显含 t)。 九、结语 牛顿力学处理单个质点的运动情况有优势,但处理复杂约束系统存在自由度多,约束方程多的缺陷。 拉格朗日提出广义坐标,处理复杂系统变得简便很多,但运动方程包含对广义坐标的二阶微分,使得方程的计算的工作量非常大。 哈密顿提出广义动量,并得到了哈密顿正则方程组。 于是,在分析系统的任一物理量Q随时间变化情况时,通过定义泊松括号,则我们有了统一的简洁的表达式。 说白了,泊松括号的作用是——在哈密顿力学中,使各类物理量的运动变化方程的描述更简洁。 (声明:以上内容借助了deepseek的搜索) 知新物理 长按二维码关注我们 温故可以知新 Was this helpful? YesNo 0 / 0