点击上方蓝字关注知新物理
1621年,斯涅耳(荷兰)通过实验发现,光从空气进入水中时,入射角正弦与折射角正弦乘以一个常数(此常数命名为折射率),这就是斯涅耳折射定律,公式为
其中,θ1表示空气中的角,θ2表示水中的角。
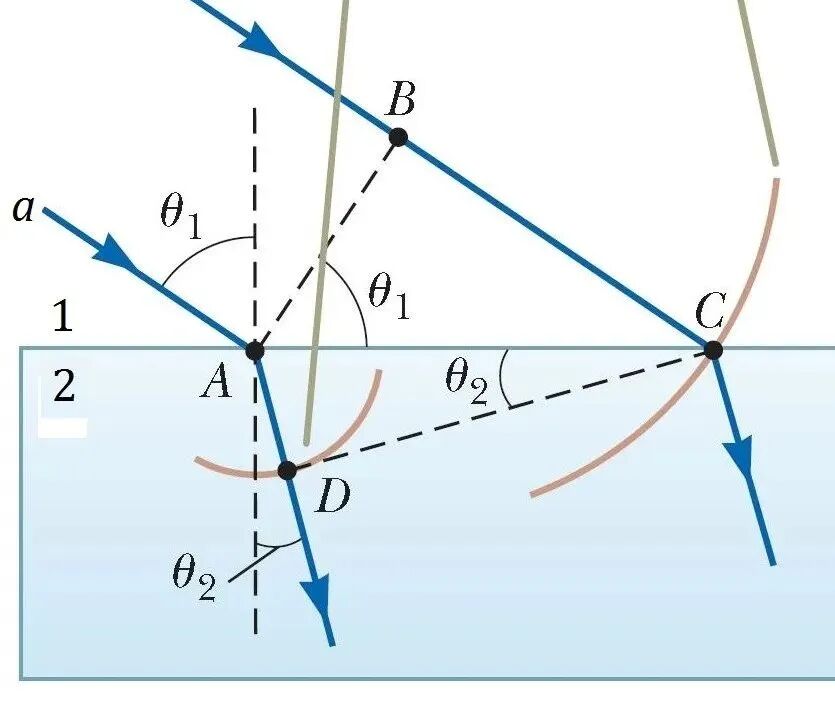
1650年,费马(法国)为了推导出斯涅尔折射定律,他认为在折射中,光显然不取最短路程,于是他试用了光取最短时间的思想(这就是费马原理,也称光取最短时间原理)。
他假定水中的光速是空气中光速的1/n,如果光取最短时间,根据上图,则通过BC和AD所用的时间应当是相同的,于是自然地推导出斯涅耳折射定律。
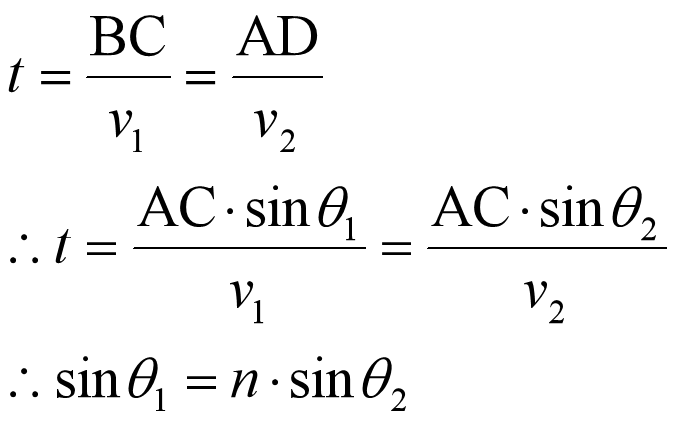
其中,v1是空气中光速,v2是水中的光速,n=v1/v2。
上式经过推导可得:

当折射率不变时,原理退化为直线传播;在反射界面,自然导出入射角等于反射角。
费马原理与实验现象吻合,体现了科学哲学中对自然界“最简性”的信仰。
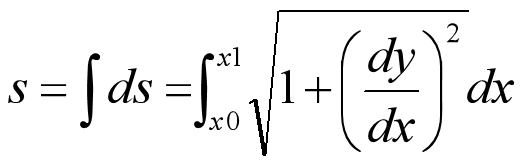
费马推导出斯涅尔折射定律之后,由此引入光程(折射率与几何路径长度的乘积积分)概念,而且断定:只有光程取极值(通常是最小值)时的几何路径才是实际几何路径(即费马原理), 由此可见,光程并不是指光运动的路程长度,而是对光的几何路径长度的一个修正,这个修正系数就是折射率。形式如下(此式命名为式1):
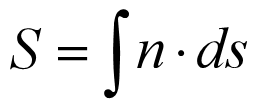
其中,S为光程,n为折射率,ds为光在传播过程中某段实际的几何路径长度。
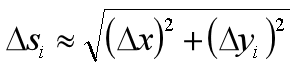
那么,某段实际的几何路径长度ds如何求解呢?
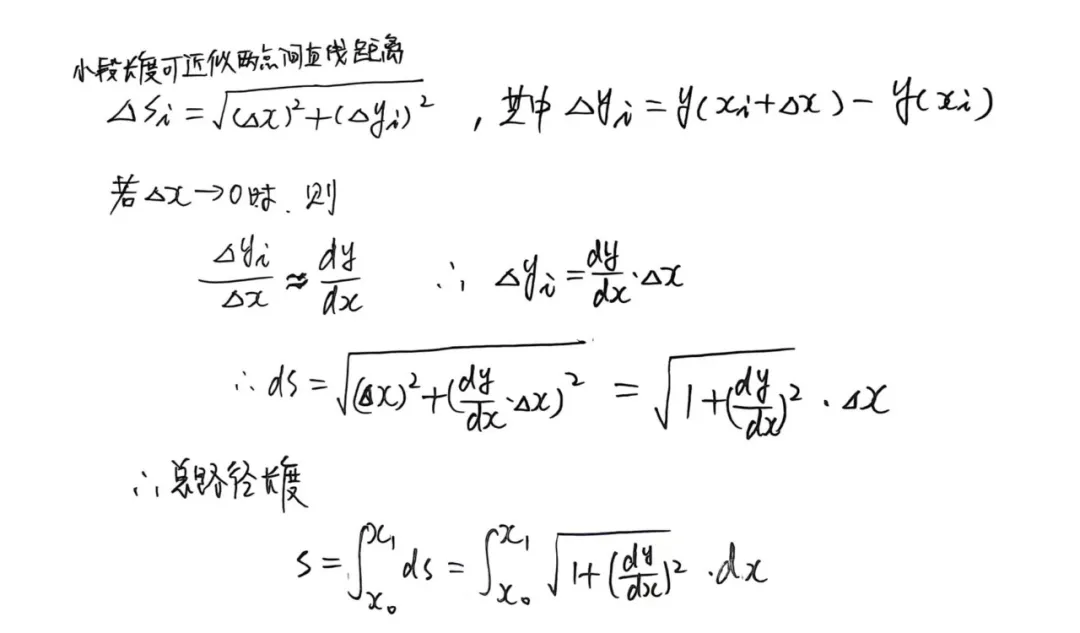
根据曲线任意两点间距离的求法——将曲线从x0到x1之间的距离分成无数小段,每段的宽度为Δx。这一小段的长度 Δs 可以近似为两点之间的直线距离:
将所有微小线段长度累加,总路径长度 S 可表示为(此式命名为式2):
具体的推导过程如下:
将式1和式2合并,我们将得到完整的光程公式(此式命名为式3 ):
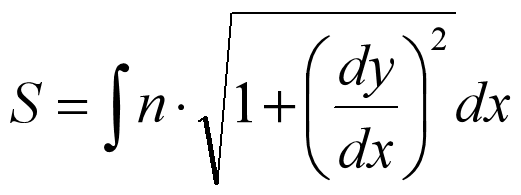
由式3可知,光程公式是一个包含函数的函数,数学上,称为泛函数。

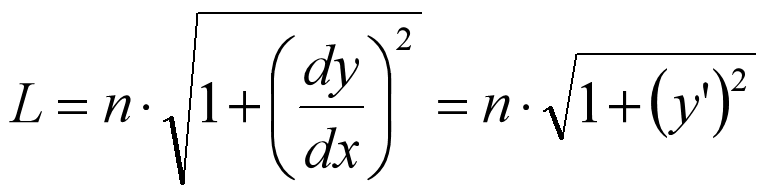
上面描述的泛函数形式中包含的函数在物理学上称为拉格朗日函数,用符号L表示。在研究光的折射现象中,拉格朗日函数L等于折射率与几何路径长度的乘积,等式如下(此式命名为式4):
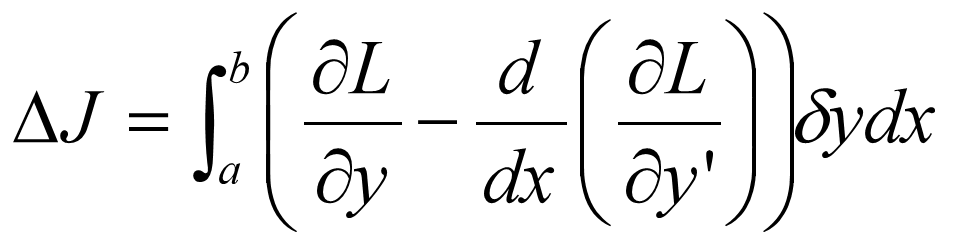
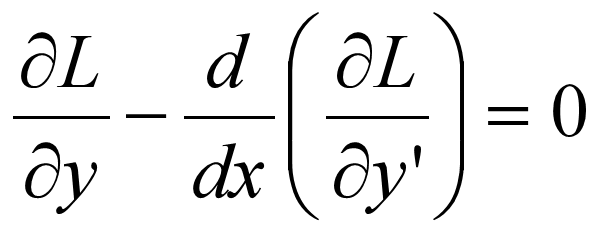
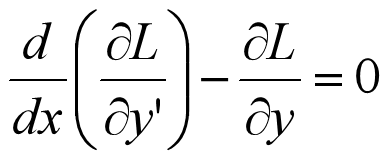
代入欧拉-拉格朗日方程将得到的等式如下(此式命名为式5):
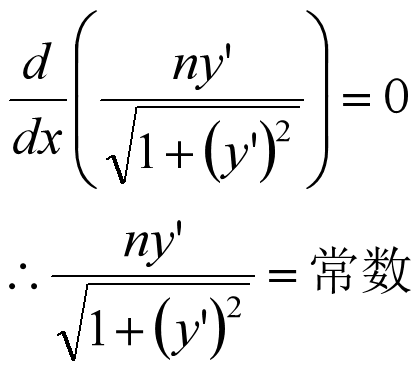
由于式4中没有显含y,则:
因此,式5可变为(此式命名为式6):
当光从介质1中光点A(折射率为n1)进入介质2中的光点B(折射率为n2),经过分界面处的P点,总光程为两段路径的积分(此式命名为式7):

由式7进行光程的变分,则等式为(此式命名为式8):

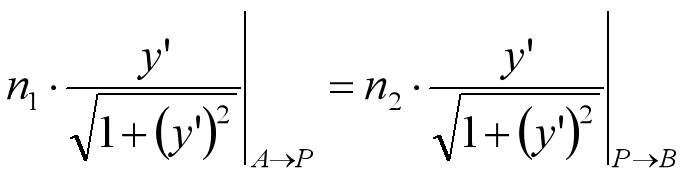
根据式5,式8可变为(此式命名为式9):

将式9进行化简,可得(此式命名为式10):
根据斜率与角度的关系,则有如下等式(此式命名为式11):
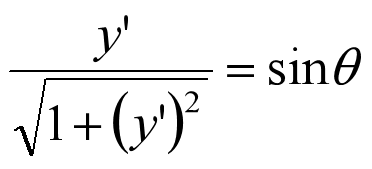
因此,将式11代入式10中,可得如下等式(此式命名为式12):
这正是斯涅尔定律,描述了光在界面处的折射规律。
非常神奇,有了光程这个概念,并对光程运用极值思想来分析物理过程,也能推导出光的折射规律 。
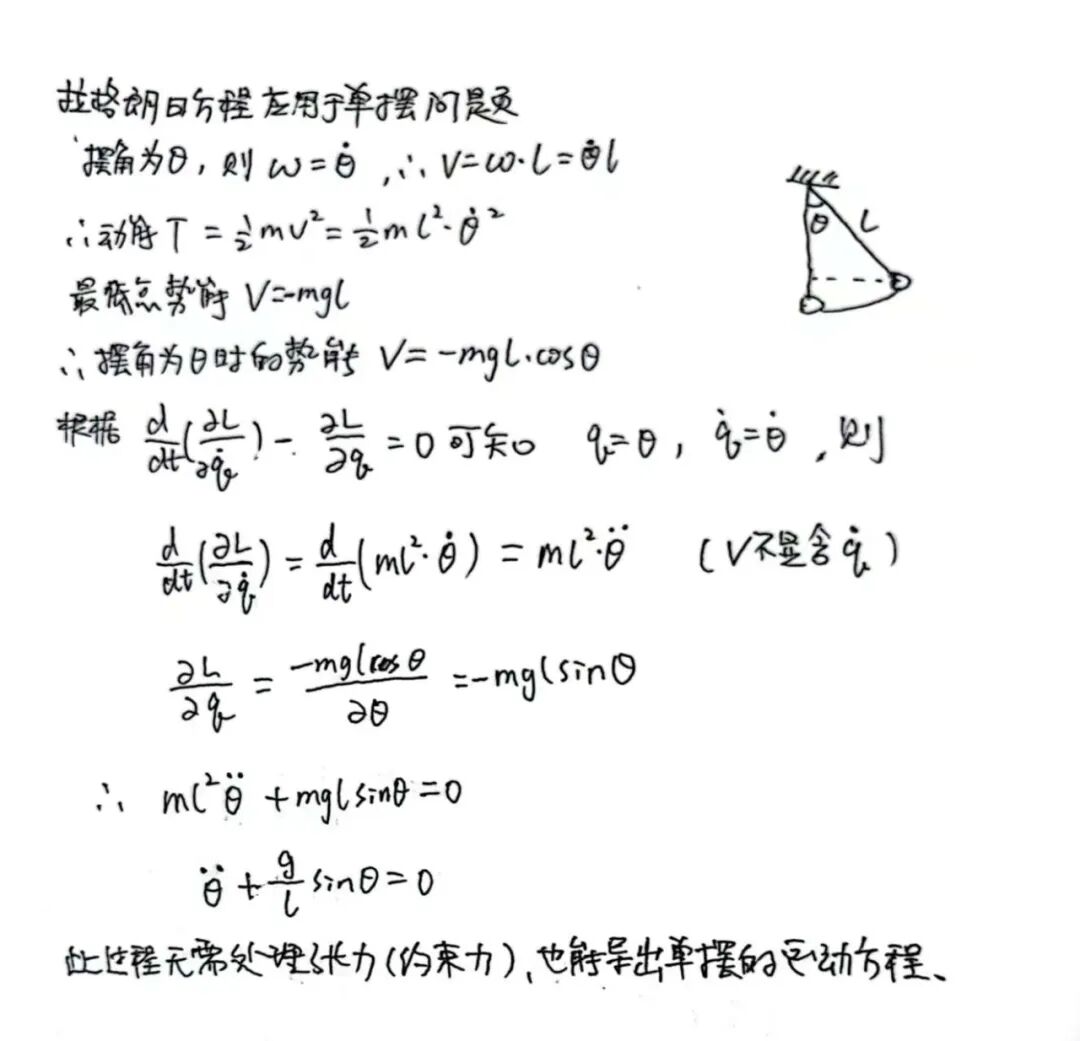
现在,我们把拉格朗日方程运用在单摆问题中进行分析,看看我们有什么新的发现?
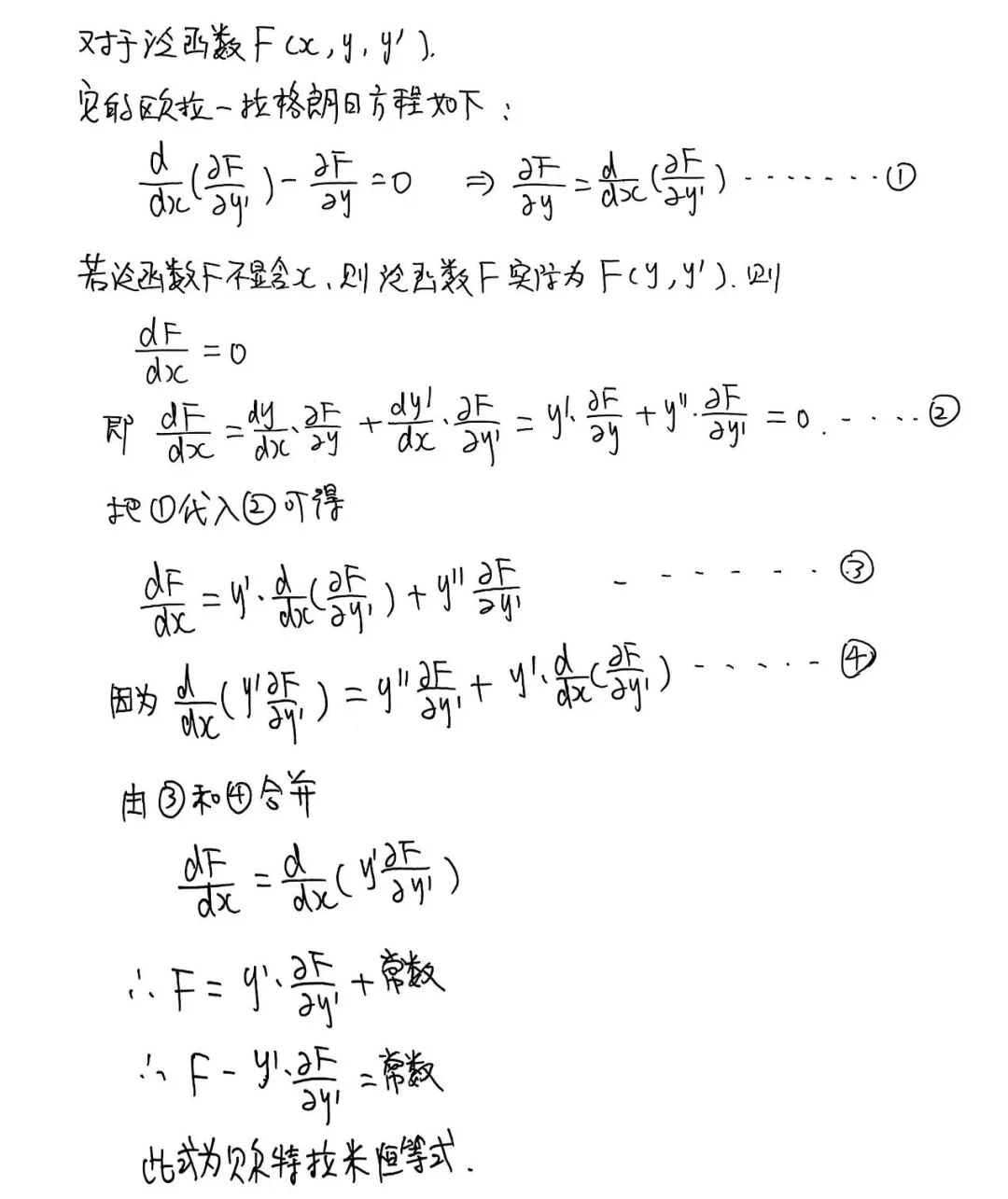
欧拉-拉格朗日方程是二阶微分方程,在实际应用中,常会出现泛函数F(x,y,y’)并不直接不显式地依赖于x的情况,也就是F只依赖于y和y’,而不直接依赖于x。比如,一个物体匀速直线运动时,x改变,但F并不发生改变。
这个时候,贝尔特拉米恒等式可以替代欧拉-拉格朗日方程,给出一个更简洁的条件,也就是说,原来的欧拉-拉格朗日方程将会有新的更简洁的表达式(由二阶微分变为一阶微分),式子如下(此式命名为式14):

上式就是著名的贝尔特拉米恒等式。
具体的推导过程如下:
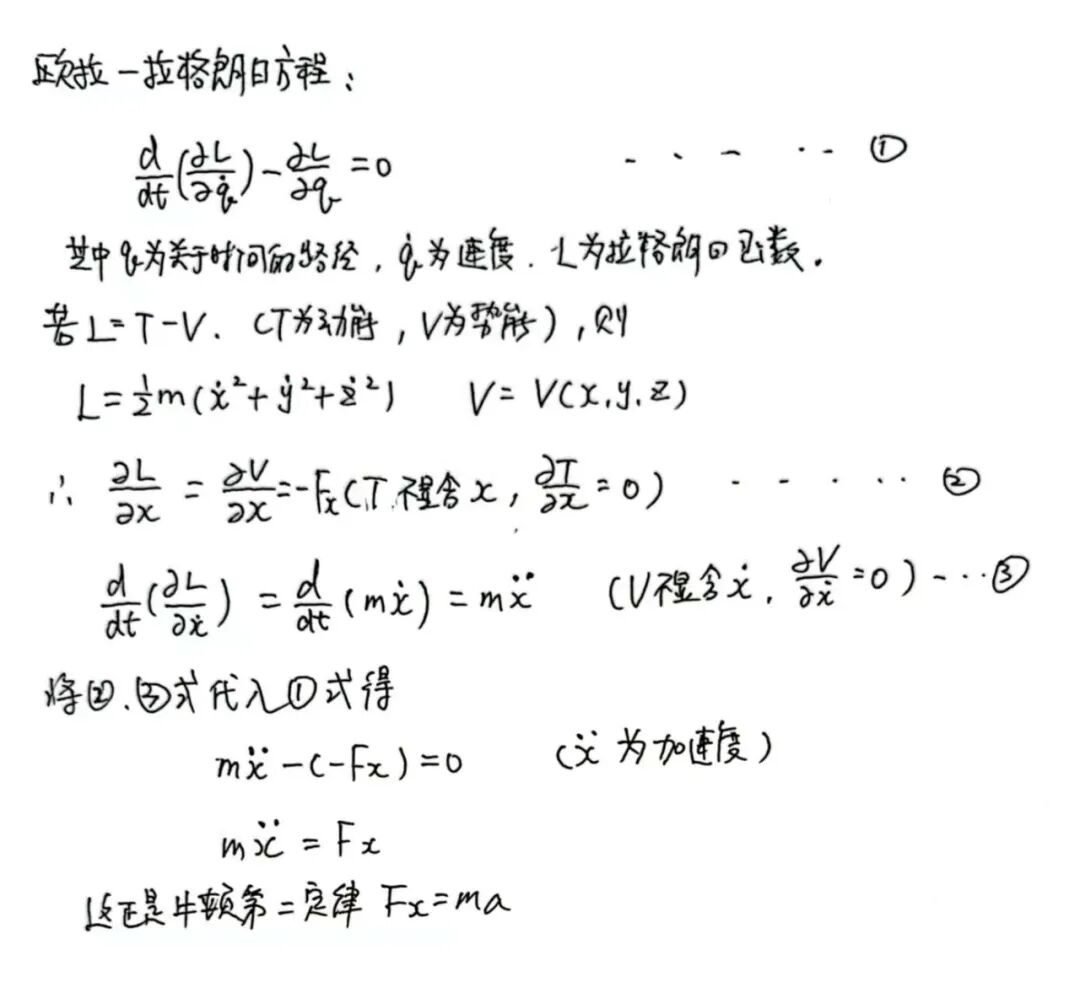
在笛卡尔坐标系中,自由粒子的动能为
由于拉格朗日函数L=T-V(势能V不显含速度),则拉格朗日函数对速度的偏导数为
因此,我们把广义动量定义为拉格朗日函数对广义速度的偏导数,即
把广义动量代入贝尔特拉米恒等式,可得:
显然,如果动能是速度的二次函数且势能与速度无关,这样的系统哈密顿量H代表了系统的动能与势能之和,是系统的总能量。
具体的推导过程如下:
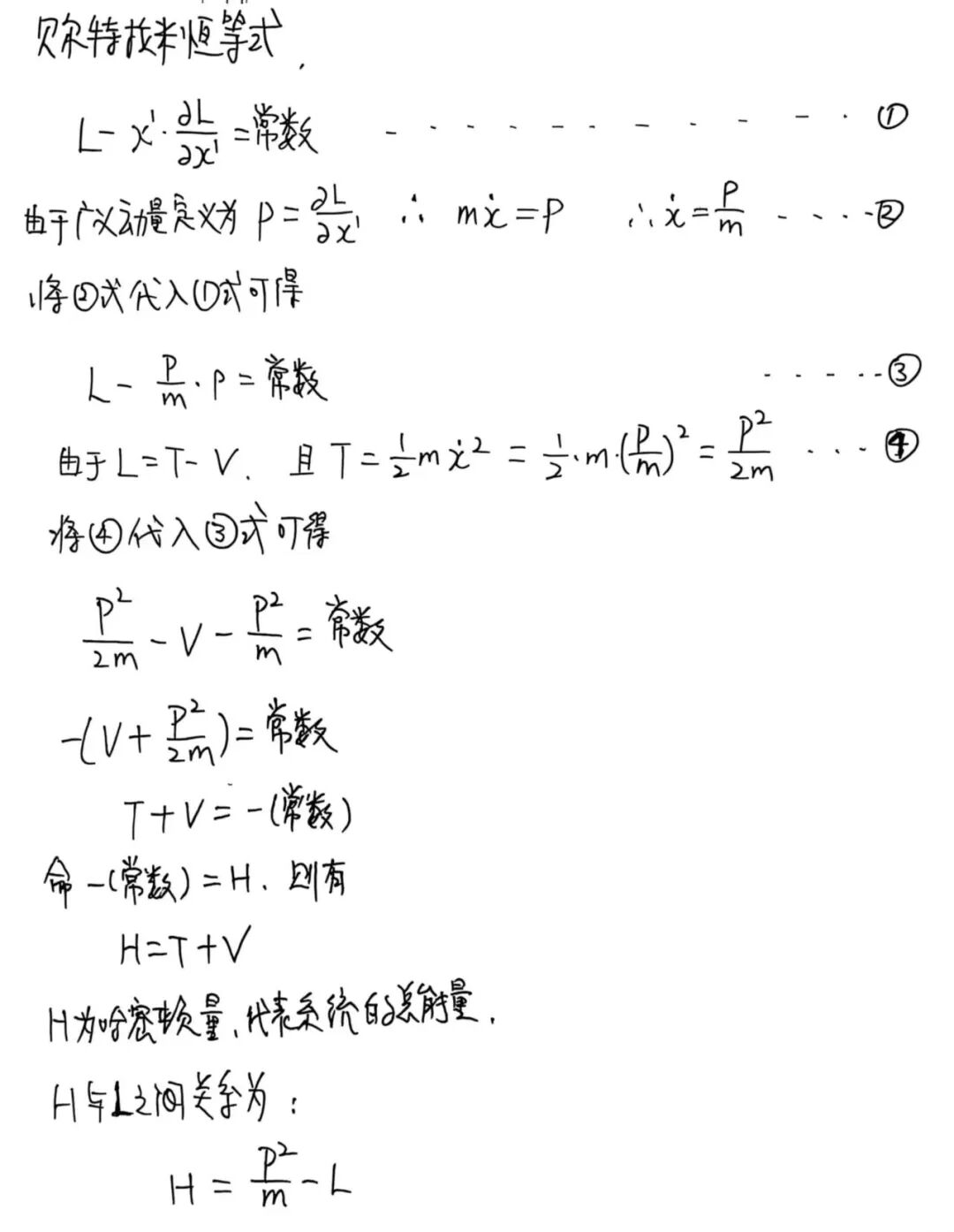
通过贝尔特拉米恒等式我们得出了一个具有代表包含系统能量的物理量——哈密顿量,而且推导出了哈密顿量H与拉格朗日量L之间的关系。
由于贝尔特拉米恒等式是一个只包含一阶微分的数学表达式,相对二阶微分,形式简单易算。因此,有必要试试将哈密顿量是否也转变为一阶微分形式——即用广义动量代替广义速度,使广义速度依赖于广义坐标q,广义动量p和时间t。则广义速度的形式为:
其中,i是指某个自由度。
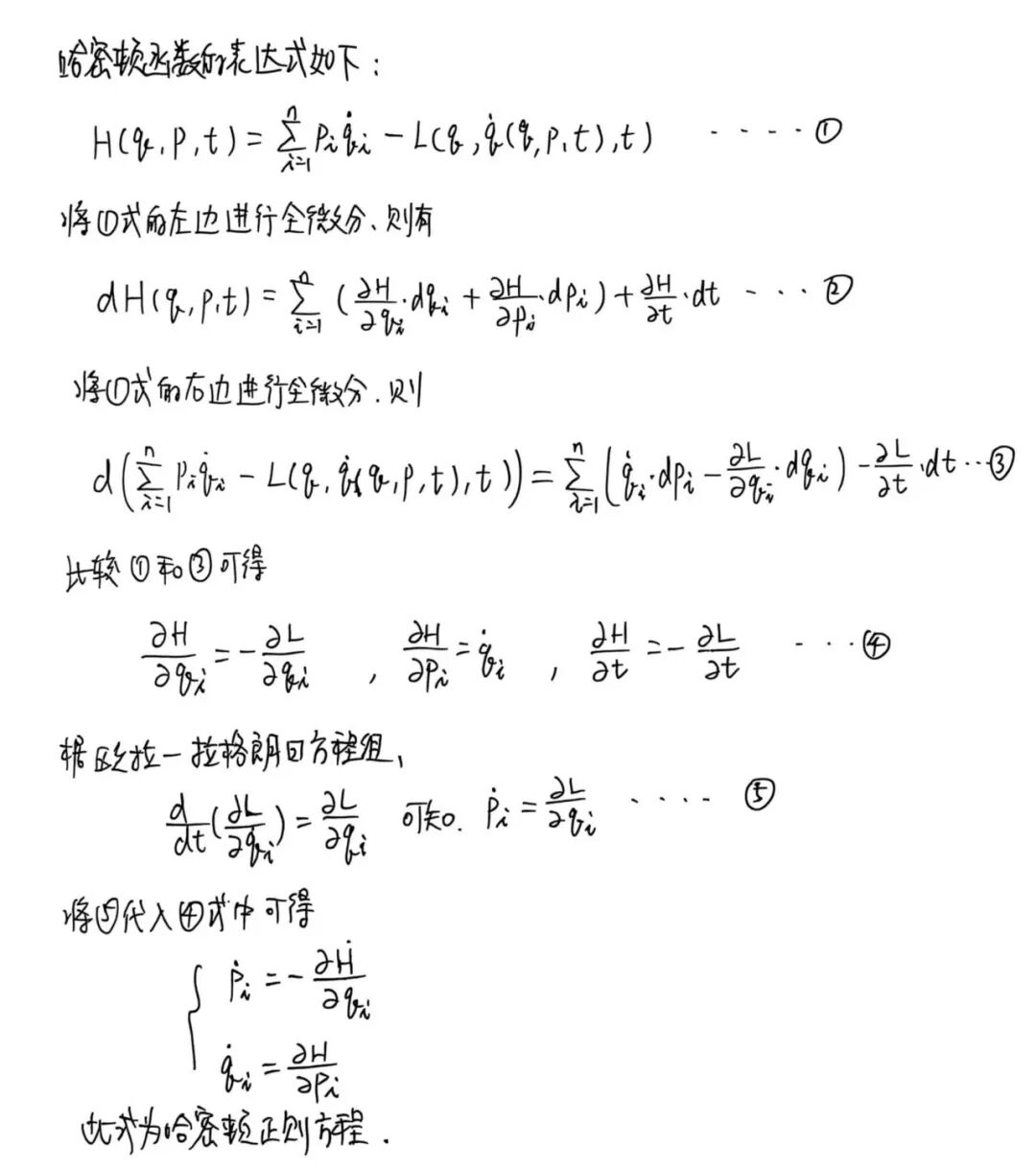
根据贝尔特拉米恒等式,以及系统中有n个自由度,则哈密顿量的表达式为(此式命名为式15):

对式15的左边和右边都进行全微分,最终我们将得到如下一组等式(此式命名为式16):
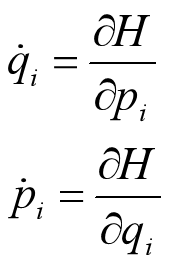
式16就是著名的哈密顿正则方程组。
具体的推导过程如下:
哈密顿方程将系统的演化分解为位置和动量的相互依赖关系,这种关系称为共轭关系(或对偶关系)。位置的变化率由哈密顿量对动量的梯度驱动(对应速度),而动量的变化率由哈密顿量对位置的负梯度驱动(对应力)。
也就是说,一个系统可由同时用坐标和动量描述系统状态,系统的微观状态可由每个粒子的坐标和动量完全确定,所有可能的微观状态构成一个高维空间——即相空间。对于一个具有 n 个自由度的系统,相空间是一个 2n 维的数学空间,比如单粒子三维运动:6维相空间(3位置+3动量)。
相空间也是将拉格朗方程局限于位形空间(仅包含位置信息)转变为更高维度的抽象数学空间。
(1)相空间可直观展示动力学演化。系统的演化在相空间中表现为一条轨迹,通过分析轨迹的几何特征(如闭合曲线、螺旋形、吸引子等),可以直观判断系统的稳定性、周期性或混沌性。比如:简谐振子的相空间轨迹是椭圆,表明其运动是周期性的。
(2)全局视角描述系统状态。相空间将系统的所有自由度(如位置和动量)整合到一个几何框架中,每个点代表系统的完整状态,同时追踪系统的位置和动量信息,避免了传统位形空间(仅描述位置)的局限性。比如,在经典力学中,一个质点的运动轨迹在相空间中表示为一条曲线,包含位置和动量的实时变化。
总之,通过将复杂的动力学问题转化为几何问题,相空间为科学家提供了强大的分析工具。
固定能量或者某个循环过程中(比如谐振子),积分∮pdq 是一个绝热不变量,当系统参数缓慢变化时,这个积分保持不变。比如,在量子化条件中,玻尔-索末菲量子化条件就是用了这样的积分,其值是h的整数倍。
(以上诸多内容的探索来自deepseek,感谢这款人工智能助手!)

Was this helpful?
0 / 0